算法-最短路径
最短路径 Dijkstra 算法 基于贪心的单源最短路算法,其要求图中的边全部非负。 Dijkstra’s shortest path algorithm 戴克斯特拉算法-wiki 算法描述 procedure Dijkstra(G:边全为正权的图) 2 {G
绘制Landmark
绘制地图点 Overview 概率机器人详解 (Python) 3.3.1 点ランドマークの設置 本文将介绍: Landmark 是什么 如何绘制Landmark 实现Landmark 类与Map类的框架 理论 地标: $m = { m_j|j=0, 1,2,
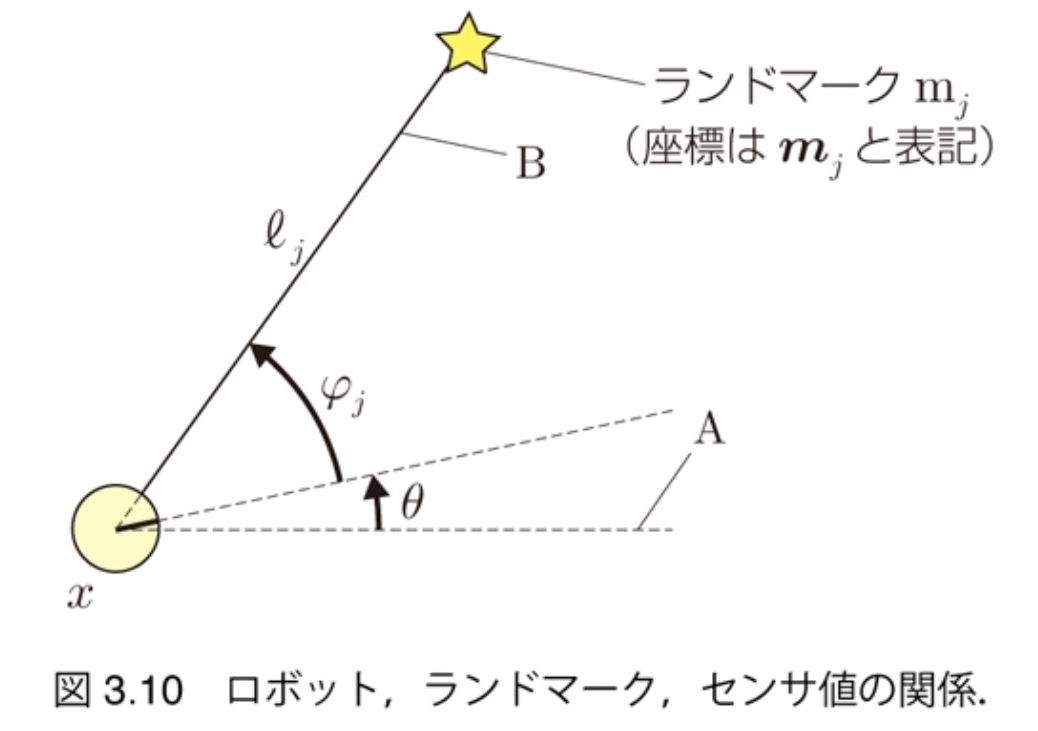
观测方程
観測方程式 $$ \begin{pmatrix} \ell_j \\ \varphi_j \end{pmatrix} = \begin{pmatrix} \sqrt{(m_{j,x} - x)^2 + (m_{j,y} - y)^2} \\ \text{ata
运动方程
内容 运动方程, 控制命令, 让机器人动起来。 理论 (Refered From: https://github.com/ryuichiueda/LNPR_SLIDES/blob/master/old_version/figs/robot_motion1.pn
Archives
2019/03 (14) 2020/08 (1) 2021/01 (2) 2021/05 (2) 2021/12 (2) 2022/03 (2) 2022/04 (2) 2023/12 (2) 2024/01 (5) 2024/04 (1) 2024/05 (1)Tags
Recent Posts