机器人位姿描述
Objective
- 绘制世界坐标系
- 如何描述机器人的位姿
- 如何绘制世界坐标系
- 如何绘制机器人位姿
可参考:3.2.2 ロボットの姿勢と描く
対向2輪ロボット(Differential wheeled robot)

机器人位姿
世界坐标系记为 $\Sigma_{world}$
位姿 (状态):位置和朝向 $x = (x, y, \theta)^T$
状态空间: 姿势(状态)的集合
位姿x所有可能的取值的集合$\chi$,例如平面上的长方形的范围内自由移动的机器人位姿的状态空间为:
$$ \chi = { x=(x, y, \theta)^T | x \in [x_{min}, x_{max}], y \in [y_{min}, y_{max}], \theta \in [- \pi, \pi) } $$
Source Code
import matplotlib.pyplot as plt
import matplotlib.patches as patches
import math
import numpy as np
class World:
def __init__(self):
self.objects = []
def append(self, obj):
self.objects.append(obj)
def draw(self):
fig = plt.figure(figsize=(8, 8))
ax = fig.add_subplot(111)
ax.set_aspect('equal')
ax.set_xlim(-5, 5)
ax.set_ylim(-5, 5)
ax.set_xlabel("X", fontsize=20)
ax.set_ylabel("Y", fontsize=20)
for obj in self.objects:
obj.draw(ax)
plt.show()
class IdealRobot:
def __init__(self, pose, color="black"):
self.pose = pose //位姿
self.r = 0.2 // 半径
self.color = color // 顡色
def draw(self, ax):
x, y, theta = self.pose
xn = x + self.r * math.cos(theta)
yn = y + self.r * math.sin(theta)
ax.plot([x, xn], [y, yn], color=self.color)
c = patches.Circle(xy=(x,y), radius=self.r, fill=False, color=self.color)
ax.add_patch(c)
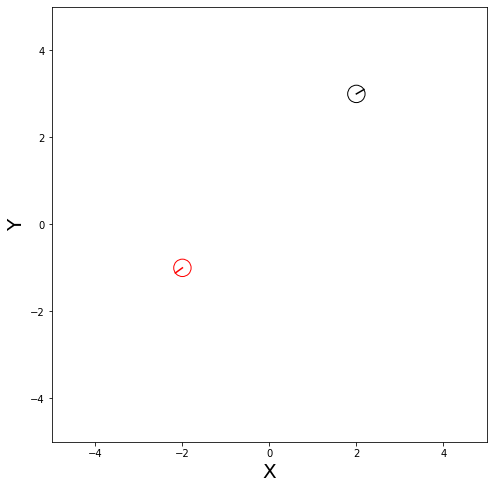
world = World()
robot1 = IdealRobot(np.array([2, 3, math.pi/6]).T)
robot2 = IdealRobot(np.array([-2, -1, math.pi/5*6]).T, "red")
world.append(robot1)
world.append(robot2)
world.draw()
References
Archives
2019/03 (14) 2020/08 (1) 2021/01 (2) 2021/05 (2) 2021/12 (2) 2022/03 (2) 2022/04 (2) 2023/12 (2) 2024/01 (5) 2024/04 (1) 2024/05 (1)Tags
Recent Posts