VINS FUSION
Introduction
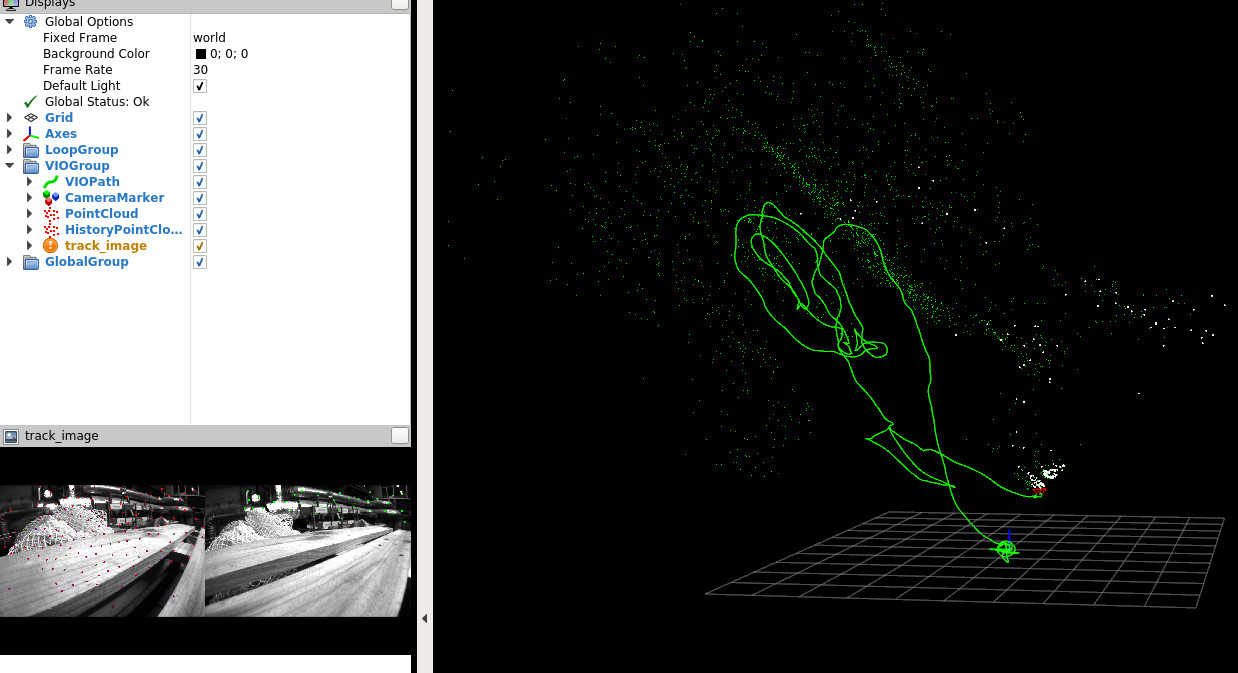
VINS-Fusion 是继 VINS-Mono 和 VINS-Mobile(单目视觉惯导 SLAM 方案)后,香港科技大学沈劭劼老师开源的双目视觉惯导 SLAM 方案,VINS-Fusion 是一种基于优化的多传感器状态估计器,可实现自主应用(无人机,汽车和 AR / VR)的精确自定位。 VINS-Fusion 是 VINS-Mono 的扩展,支持多种视觉惯性传感器类型(单目摄像机+ IMU,双目摄像机+ IMU,甚至仅限双目摄像机)。开源项目组还展示了将 VINS 与 GPS 融合的模组示例。
Build
- Get project
git clone https://github.com/yubaoliu/VINS-Fusion -b dev
- Ubuntu 16
- ROS
- OpenCV 3.x
set(OpenCV_DIR "/home/yubao/Software/install/opencv_3.3.1/share/OpenCV")
or
export OpenCV_DIR="/home/yubao/Software/install/opencv_3.3.1/share/OpenCV"
- compile
cd ROS_PROJECT_DIR
catkin_make
Problems
编译错误
修改这些变量,之前使用的是C语言版本的API,并没有包含相应的头文件,所以报措。理论上加入相应的C版本的头文件是可以通过的,但是这是API已经不再使用,建议直接改成新的。
- CV_LOAD_IMAGE_GRAYSCALE -> cv::IMREAD_GRAYSCALE
- CV_GRAY2RGB -> cv::COLOR_RGB2GRAY
- CV_FONT_HERSHEY_SIMPLEX -> cv::FONT_HERSHEY_SIMPLEX
运行错误
Segment fault.
[ INFO] [1650104763.260207805]: reading paramerter of camera /home/yubao/catkin_ws/src/VINS-Fusion/config/euroc/cam0_mei.yaml
double free or corruption (out)
调用顺序 rosNodeTest.cpp:
estimator.setParameter();
//->
featureTracker.readIntrinsicParameter(CAM_NAMES);
//->
camodocal::CameraPtr camera = CameraFactory::instance()->generateCameraFromYamlFile(calib_file[i]);
//->
cv::FileStorage fs( filename, cv::FileStorage::READ );
Refer this error: https://github.com/HKUST-Aerial-Robotics/VINS-Fusion/issues/106
这个问题我最终没有解决,错误原因应该是我使用的OpenCV是3.x,但是ROS noetic使用的OpenCV是4.x, ubuntu 20系统中的OpenCV也是4.x. 很可能是因为OpenCV版本冲突。
最终,放弃本机编译,决定使用docker,一劳永逸。
References
Archives
2019/03 (14) 2020/08 (1) 2021/01 (2) 2021/05 (2) 2021/12 (2) 2022/03 (2) 2022/04 (2) 2023/12 (2) 2024/01 (5) 2024/04 (1) 2024/05 (1)Tags
Recent Posts