Robotics
Angent的实现 Overview 之前学习了状态迁移函数,并能绘制机器人。 这节的目标是实现机器人的引擎,让机器人能动起来。 笔记 ロボットの制御指令を決めるエージェントのクラスを作ります。 「考え主体」のことを、ロボチックスや人工知能の研究分野ではエージ
Objective 绘制世界坐标系 如何描述机器人的位姿 如何绘制世界坐标系 如何绘制机器人位姿 可参考:3.2.2 ロボットの姿勢と描く 対向2輪ロボット(Differential wheeled robot) 机器人位姿 世界坐标系记为 $\Sigma_{
机器人开发环境介绍 In this section, we will tintroduce: the usage case of robots the development environment for simulation (Python + conda
平均値 $$\mu = \frac{1}{N}\sum_{i=0}^{N-1} z_i$$ $z_0, z_1, \dots, z_{N-1}$: センサ値 $N$: センサ値の個数 分散、標準偏差 $$\sigma^2 = \frac{1}{N-1}\sum
Objective 用动画来绘制Robot仿真环境 重要函数 matplotlib.animation.FuncAnimation class matplotlib.animation.FuncAnimation(fig, func, frames=None,
绘制地图点 Overview 概率机器人详解 (Python) 3.3.1 点ランドマークの設置 本文将介绍: Landmark 是什么 如何绘制Landmark 实现Landmark 类与Map类的框架 理论 地标: $m = { m_j|j=0, 1,2,
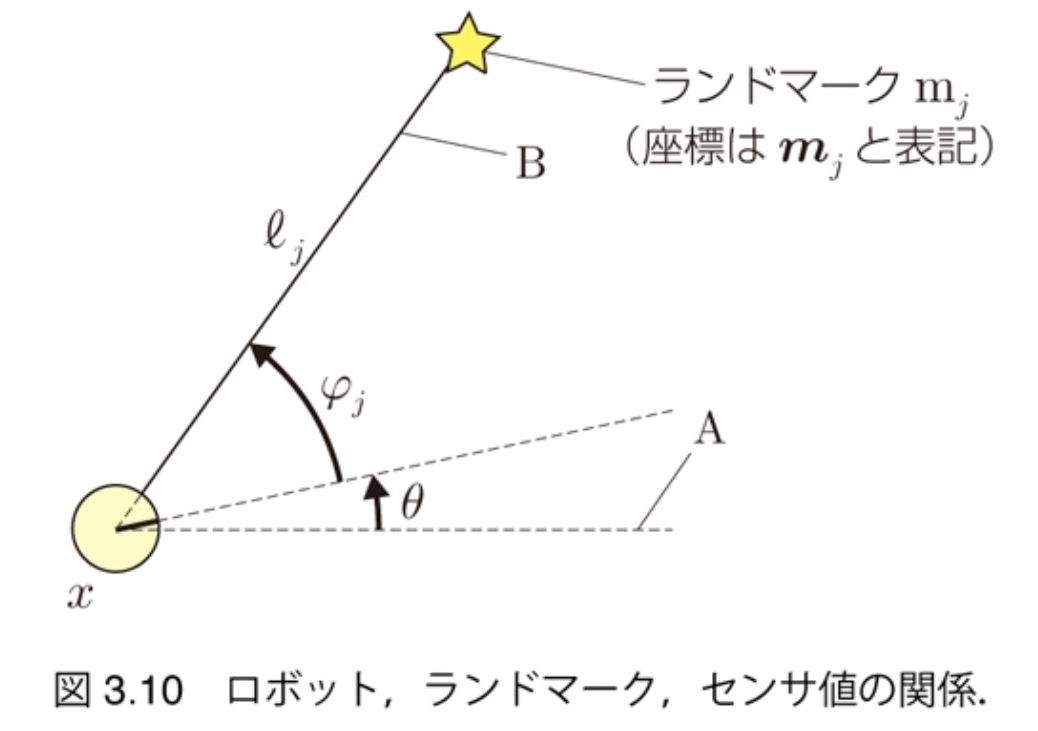
観測方程式 $$ \begin{pmatrix} \ell_j \\ \varphi_j \end{pmatrix} = \begin{pmatrix} \sqrt{(m_{j,x} - x)^2 + (m_{j,y} - y)^2} \\ \text{ata
内容 运动方程, 控制命令, 让机器人动起来。 理论 (Refered From: https://github.com/ryuichiueda/LNPR_SLIDES/blob/master/old_version/figs/robot_motion1.pn
Archives
2019/03 (14) 2020/08 (1) 2021/01 (2) 2021/05 (2) 2021/12 (2) 2022/03 (2) 2022/04 (2) 2023/12 (2) 2024/01 (5) 2024/04 (1) 2024/05 (1)Tags
Recent Posts